|
Speed does not become zero even when potentiometer is made
zero....
|
|
|
|
|
|
Some
times, too much of gain in the Speed Amplifer makes the motor to rotate very
slowly even at zero speed reference signal. The only method to prevent this
from happening, if at all it is critical, is to reduce the gain without
compromising on performance at higher speed levels. If the drive has a
provision to apply a biasing signal of opposite polarity as that of the main
speed reference signal, applying a bias may also solve this problem. This may
add a small non-linearity in the overall performance. Unstable
or erratic Speed control. Speed
variation can be gradual over time or erratic and unpredictable. If the
variation is gradual it could be arising from heating of some component, especially
in the feedback circuit. Sudden or erratic variations can be caused by
several reasons. Dry solder in reference path, leaky capacitors in Ramp
circuit are just two of many reasons. Motor
starts only after reference voltage is increased substantially, but the
control is okay once the motor is started... This
is a very peculiar situation. As the drive reference voltage is slowly
increased, the motor does not repspond for quite some voltage. The motor
starts running at a much higher speed. However, once started, the reference
voltage has good control and the speed can be reduced almost till zerp
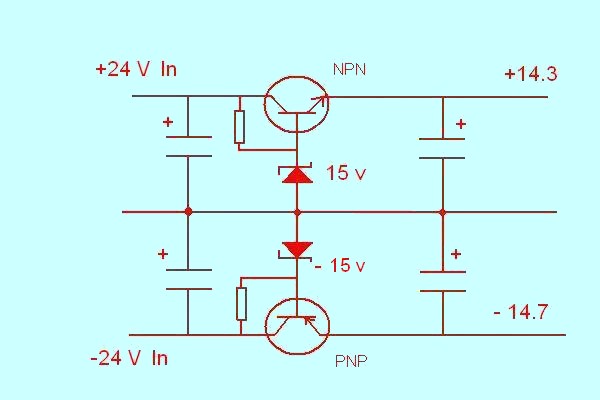
without problem. This is caused by unequal supply voltages to the opertional
amplifiers in RAMP circuit. Normally the voltages are +15 and -15 volts. If
these voltages are unequal, e.g. +14.3 V and – 16.5 volts, then the situation
described above is arises. Given below is a typical arrangement of generating
+ve and -ve voltages without using 3 pin voltage regulators. The selection of
zener diode in one of the sections may reqire trial and error method to get
exact equal voltages at the output of NPN and PNP transistors.
|
|
|
|
|
Download PDF version of these pages.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Speed control not satisfactory
|
|
|
|
|
|
|
|
|
|
|
|
|